cd ~ git clone https://github.com/slightech/MYNT-EYE-D-SDK.git cd MYNT-EYE-D-SDK make init make ros make all echo"source ~/MYNT-EYE-D-SDK/wrappers/ros/devel/setup.bash" >> ~/.bashrc source ~/.bashrc
#camera calibration, please replace it with your own calibration file. model_type:PINHOLE camera_name:camera image_width:640 image_height:480 distortion_parameters: k1:-0.29901885986328125 k2:0.08110046386718750 p1:-0.00021743774414062 p2:-0.00006866455078125 projection_parameters: fx:354.25241088867187500 fy:354.28451538085937500 cx:326.56863403320312500 cy:254.24504089355468750
# Extrinsic parameter between IMU and Camera. estimate_extrinsic:0# 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it. # 1 Have an initial guess about extrinsic parameters. We will optimize around your initial guess. # 2 Don't know anything about extrinsic parameters. You don't need to give R,T. We will try to calibrate it. Do some rotation movement at beginning. #If you choose 0 or 1, you should write down the following matrix. #Rotation from camera frame to imu frame, imu^R_cam extrinsicRotation:!!opencv-matrix rows:3 cols:3 dt:d data: [ 0.99996652, 0.00430873, 0.00695718, 0.00434878, -0.99997401, -0.00575128, 0.00693222, 0.00578135, -0.99995926] #Translation from camera frame to imu frame, imu^T_cam extrinsicTranslation:!!opencv-matrix rows:3 cols:1 dt:d data: [-0.04777362000000000108,-0.00223730999999999991, -0.00160071000000000008]
#feature traker paprameters max_cnt:150# max feature number in feature tracking min_dist:30# min distance between two features freq:10# frequence (Hz) of publish tracking result. At least 10Hz for good estimation. If set 0, the frequence will be same as raw image F_threshold:1.0# ransac threshold (pixel) show_track:1# publish tracking image as topic equalize:1# if image is too dark or light, trun on equalize to find enough features fisheye:0# if using fisheye, trun on it. A circle mask will be loaded to remove edge noisy points
#optimization parameters max_solver_time:0.04# max solver itration time (ms), to guarantee real time max_num_iterations:8# max solver itrations, to guarantee real time keyframe_parallax:10.0# keyframe selection threshold (pixel)
#imu parameters (discrete case) The more accurate parameters you provide, the better performance acc_n:2.1657228523252730e-02# accelerometer measurement noise standard deviation. gyr_n:2.1923690143745844e-03# gyroscope measurement noise standard deviation. acc_w:3.8153871149178200e-04# accelerometer bias random work noise standard deviation. gyr_w:1.4221215955051228e-05# gyroscope bias random work noise standard deviation.
g_norm:9.806# gravity magnitude
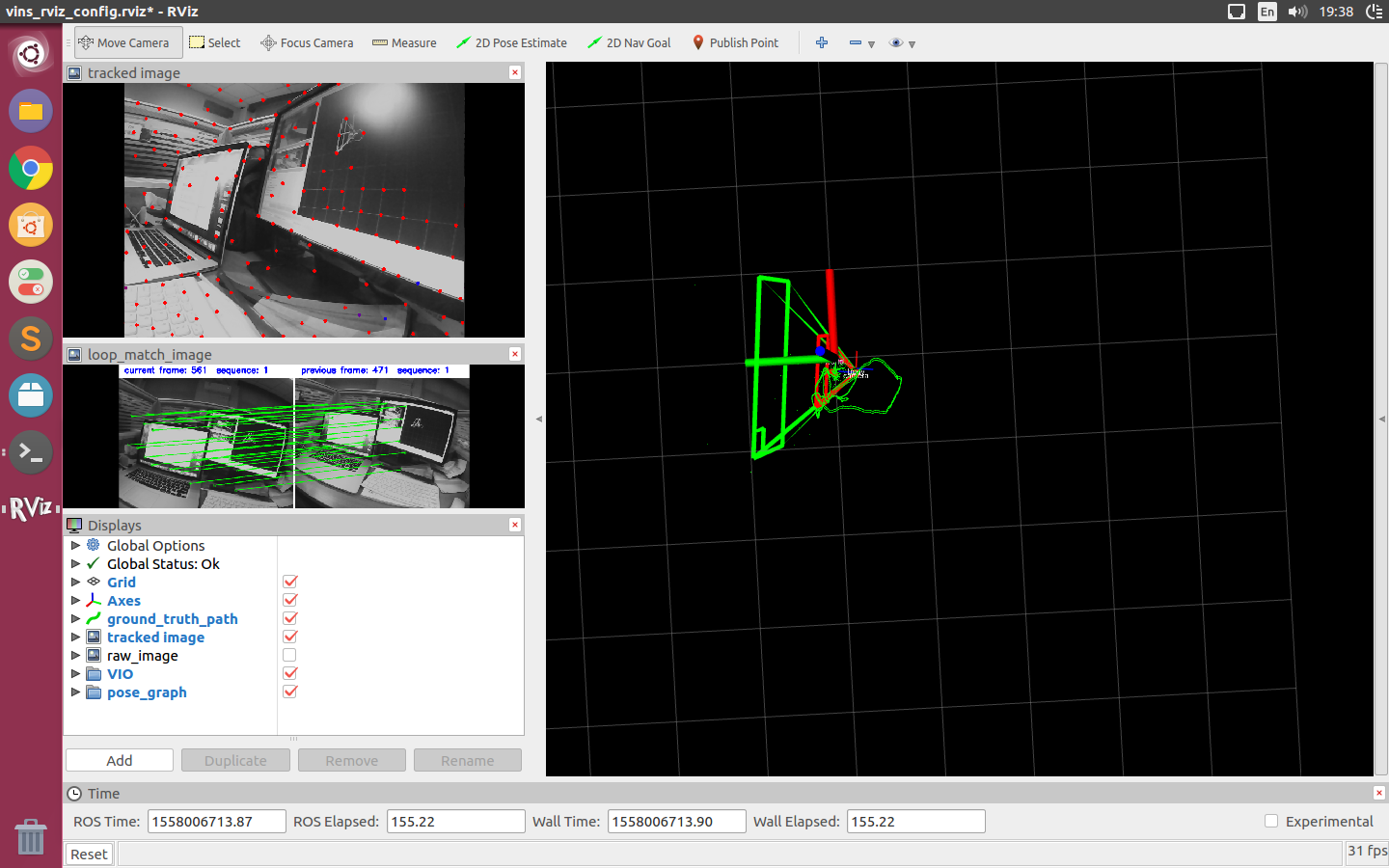
#loop closure parameters loop_closure:1# start loop closure load_previous_pose_graph:0# load and reuse previous pose graph; load from 'pose_graph_save_path' fast_relocalization:0# useful in real-time and large project pose_graph_save_path:"/home/gjh/catkin_ws/src/MYNT-EYE-VINS-Sample/config/mynteye/pose_graph/"# save and load path
#unsynchronization parameters estimate_td:0# online estimate time offset between camera and imu td:0# initial value of time offset. unit: s. readed image clock + td = real image clock (IMU clock)
#rolling shutter parameters rolling_shutter:0# 0: global shutter camera, 1: rolling shutter camera rolling_shutter_tr:0# unit: s. rolling shutter read out time per frame (from data sheet).
#visualization parameters save_image:1# save image in pose graph for visualization prupose; you can close this function by setting 0 visualize_imu_forward:0# output imu forward propogation to achieve low latency and high frequence results visualize_camera_size:0.4# size of camera marker in RVIZ